Loonwerker Adwin Breure achter het stuur van een van de Puma-zelfrijdende rooiers van Loonbedrijf Breure, met op zijn smartphone de AVR Connect-app. AVR Connect levert hem opmerkelijke inzichten op. - Foto's: Peter Roek
Dankzij AVR Connect staan AVR-pootmachines en -rooiers minder vaak stil, zijn storingen eerder verholpen en hebben gebruikers inzicht in de werkelijke kosten van aardappelen poten en oogsten. Dat levert opmerkelijke inzichten op, zowel voor akkerbouwers en loonwerkers als de fabrikant. Dit kun je ermee.
Van telemetrie (op afstand meekijken) op trekkers, maaidorsers of zelfrijdende hakselaars kijken we niet meer op. Minder bekend is dat de Belgische aardappelspecialist AVR ook zoiets aanbiedt: AVR Connect. Het is geschikt voor iedere Ceres 440- en 450-pootmachine en elke Puma 4.0– en Spirit 7200-rooier. Af fabriek zit het standaard zonder meerprijs op de laatste twee modellen. Op de andere machines is het een optie, met een geringe meerprijs.
‘Connect’ betekent dat de machine verbonden is met een online cloudomgeving waarin alle beschikbare data samenkomen. AVR noemt het: ‘een online verzamelplaats voor alle machinedata van zowel op als naast het veld’. Hiervoor voorziet de fabrikant de machine van een IoT-module met een simkaart (4G). Voor de ruwe positiebepaling en meer bereik is er standaard een 4G/gps-antenne.
Dankzij data houdt AVR focus op banden
Mits de eigenaar toestemt, kan AVR via AVR Connect meekijken op een machine. Dat levert opmerkelijke inzichten op. Zo heeft AVR besloten af fabriek te blijven focussen op banden onder zelfrijdende aardappelrooiers.
Dankzij AVR Connect kwam aan het licht dat de gemiddelde zelfrijder maar de helft van de tijd echt aan het rooien is. “De rest van de tijd is de chauffeur aan het wachten op een volgende kipper, of rijdt de machine op de weg”, zegt Kristof De Ruyck, Benelux sales manager van AVR. “Dat inzicht was echt opmerkelijk. Zowel voor ons als voor de klanten.”
Een ander inzicht is dat wereldwijd het gemiddelde brandstofverbruik van de Puma 4.0 slechts 27 liter per uur bedraagt. De Ruyck: “Daarmee kunnen we onze claim van zuinigste zelfrijder kracht bijzetten.” Overigens monitort motorenleverancier Volvo de motoren in de zelfrijdende rooier met een eigen telemetriesysteem.
Met AVR Connect heb je niet alleen tijdens, maar ook na het poten online inzicht in onder meer de capaciteit van de trillers, het aantal missers, de pootafstand, de druk op de aanaardkap en het aantal gepote poters. – Foto: AVR
Kopie machinedisplay en meer
Simpel gezegd kun je alle instellingen en parameters op het display in de cabine ook op het dashboard van AVR Connect zien. Denk bij een rooier aan de hellingshoek en snelheid van de zeefbanden, de reinigingscapaciteit, de rijsnelheid, de effectieve oogsttijd, de wachttijden (mits geregistreerd), het geoogste oppervlak, het brandstofverbruik actueel en per perceel, de motor- en machineparameters en de oliedruk. Bovendien kun je storingen en foutcodes uitlezen.
Via weegcellen onder de leestafel zijn de actuele en totale opbrengst bekend. Bij een pootmachine zie je de capaciteit van de trillers, het aantal missers, de pootafstand, de druk op de aanaardkap, het brandstofverbruik van de trekker (mits gekoppeld) en het exacte aantal gepote poters.
Alle gegevens worden gelogd in zogenoemde trips. Zodra een perceel bekend is in AVR Connect, worden alle tripdata automatisch gelinkt aan dit veld. Het maakt niet uit of je met één of meerdere machines op hetzelfde perceel werkt. Wel AVR-machines natuurlijk … Met geofencing, een digitale omheining als het ware, ontvang je een seintje zodra de machine daarbuiten komt. Voor data-uitwisseling zijn er momenteel koppelingen met John Deere Operations Centre, Dacom Cloudfarm en WatchItGrow (in België).
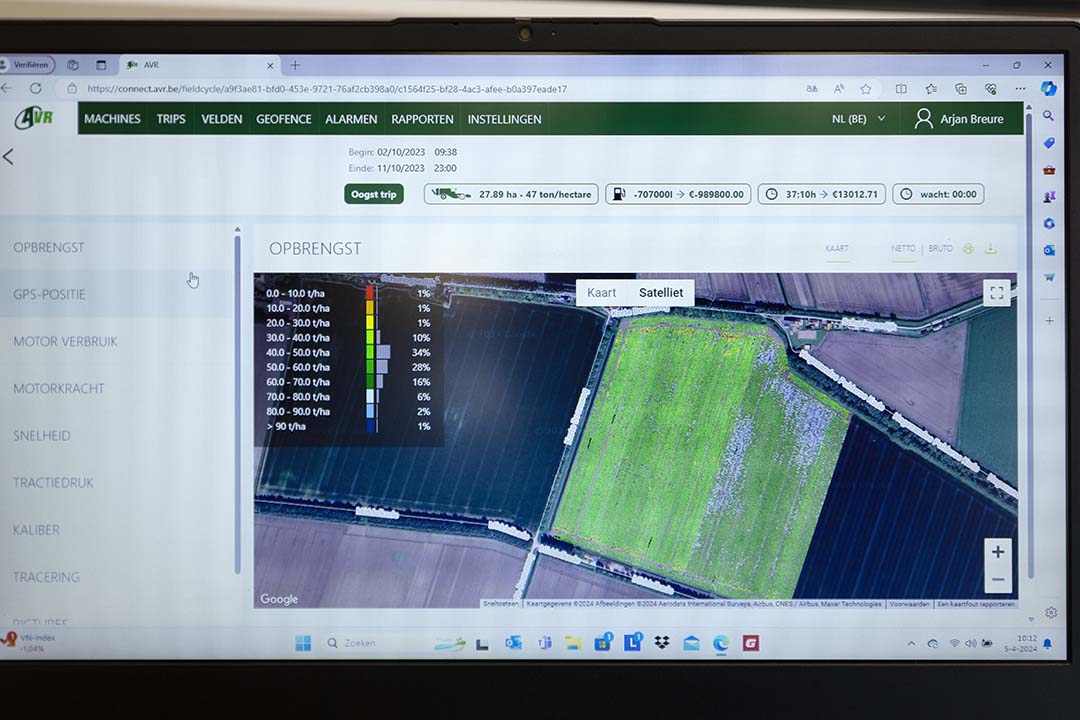
Een oogsttrip van begin oktober 2023. Naast de opbrengstkaart zie je onder meer het oppervlak, de gemiddelde opbrengst en de totaal bestede tijd (het dieselverbruik klopt in dit geval niet).
Dealers activeren
Naast inzicht in de realtime-prestaties van de machine, is diagnose op afstand een voordeel voor de gebruiker. “Ons aanvankelijke doel was om data van eindgebruikers rechtstreeks inzichtelijk te krijgen en met hen te delen. We zitten met taalbarrières en talloze tijdzones, die soms leiden tot onbedoelde misverstanden en vertraging”, zegt De Ruyck. “Nu kan de dealer op verzoek live meekijken, storingscodes analyseren en zoveel mogelijk op afstand oplossen. Ook kunnen we op een voor de klant geschikt moment software-updates doorvoeren zonder dat er iemand naartoe moet. Is dat toch nodig, dan leidt Google Maps je precies tot naast de machine. Vrijwel elke Puma 4.0 is ondertussen al wel eens via AVR Connect benaderd voor service.”
Servicemonteurs kunnen via AVR Connect op verzoek live meekijken, storingscodes analyseren en storingen op afstand oplossen. Ook kunnen ze op een voor de klant geschikt moment software-updates doorvoeren zonder er naartoe te gaan. – Foto: AVR
AVR Connect niet altijd gebruikt
Vijf jaar geleden alweer introduceerde AVR zijn platform. Inmiddels is elke Spirit 7200-getrokken rooier en elke Puma 4.0-zelfrijder er standaard mee uitgerust. Naar schatting kiest 60 tot 70% van de kopers ervoor, al gebruikt niet iedereen het actief. “20 tot 30% doet iets met de data en zet die om in informatie”, aldus De Ruyck. “Sommigen twijfelen aan het delen van data over het rooiproces en de effectiviteit ervan met aardappelverwerkers. Maar bij een loonwerker in het Verenigd Koninkrijk die veel voor Lamb Weston rooit, kan de verwerker live meekijken tijdens het rooien en daar met de verwerkingscapaciteit in de fabriek op inspringen.”
Een andere AVR-gebruiker gebruikt de informatie om best practices van de ene rooier te kopiëren naar de andere. “In België is effectieve kostprijsberekening vaak het belangrijkste argument, omdat hier veel aardappelen worden verwerkt. Hoe groter de schaal, hoe meer profijt je hebt van AVR Connect. Bij meer dan 200 tot 300 hectare aardappelen heb je het wat mij betreft nodig om optimaal te kunnen presteren.”
Realtime overzicht van werkzaamheden
Gebruikers waarderen vooral het realtime-overzicht van de werkzaamheden – wat is waar gaande? Dat is waardevol voor de planning, zeker als er meerdere machines aan het werk zijn.
Ook als het werk gedaan is, biedt het dashboard een schat aan info: de efficiëntie van het poot- of rooiproces, de verbruikte poters, de hoeveelheid kunstmest, granulaat en brandstof, het gerooide oppervlak en in combinatie met opbrengstmeting het tonnage.
Registreer je wachttijden, dan is in combinatie met transporttijden de effectiviteit van een machine zichtbaar. Hiermee kun je de kosten per uur en per hectare tot achter de komma berekenen.
Next step: zelfregulerende rooier
AVR gebruikt alle gegevens en inzichten om de aardappelrooier van de toekomst te ontwikkelen. Eentje die net als moderne maaidorsers zoveel mogelijk op de automatische piloot kan werken. Een zelfrijder die de chauffeur zoveel mogelijk ondersteunt bij het optimaliseren van het rooiproces.
Het doel van AVR is om een zelfregulerende rooimachine te ontwikkelen die met (visuele) camera’s en kunstmatige intelligentie wordt bediend en geoptimaliseerd. De Ruyck: “Dat is echter veel gecompliceerder dan bij een maaidorser, omdat je met een aardappelrooier in de grond werkt. Dan ligt de focus om de machine bij steeds verschillende rooi-, bodem- en weersomstandigheden zo optimaal mogelijk te benutten.